Keevitusroboti töökamber / keevitusroboti tööjaam

Keevitusroboti töötsükkelSeda saab kasutada tootmises, paigaldamises, testimises, logistikas ja muudes tootmisühendustes ning seda kasutatakse laialdaselt autotööstuses ja autoosades, ehitusmasinates, raudteetranspordis, madalpinge elektriseadmetes, elektrienergias, IC-seadmetes, sõjatööstuses, tubakatööstuses, rahanduses, meditsiinis, metallurgias, trüki- ja kirjastustööstuses ning sellel on lai valik rakendusi. See mitte ainult ei hõlbusta ettevõtte järelevalvet ja säästab kulusid, vaid tagab ka keevituskvaliteedi, stabiilse efektiivsuse ja kõrge ohutustaseme. See on laia kasutajaskonna valik.
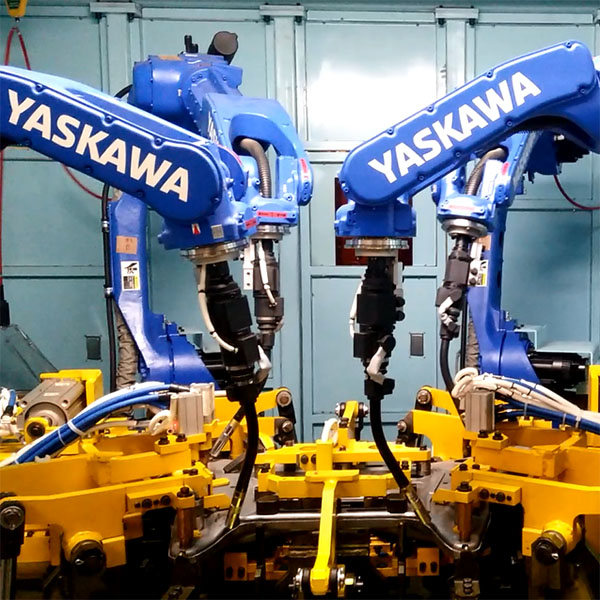
Keevitusprotsessi tehnoloogilise osana keevitamineroboti tööjaammuutub tootmisliinil keevitusfunktsiooniga "jaamaks". See on suhteliselt iseseisev juhtimissüsteem, kõik roboti toimingud või toimingud teostab keevitusroboti enda juhtimissüsteem.
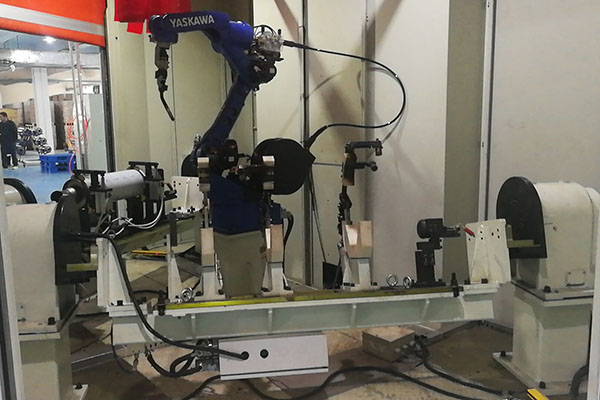



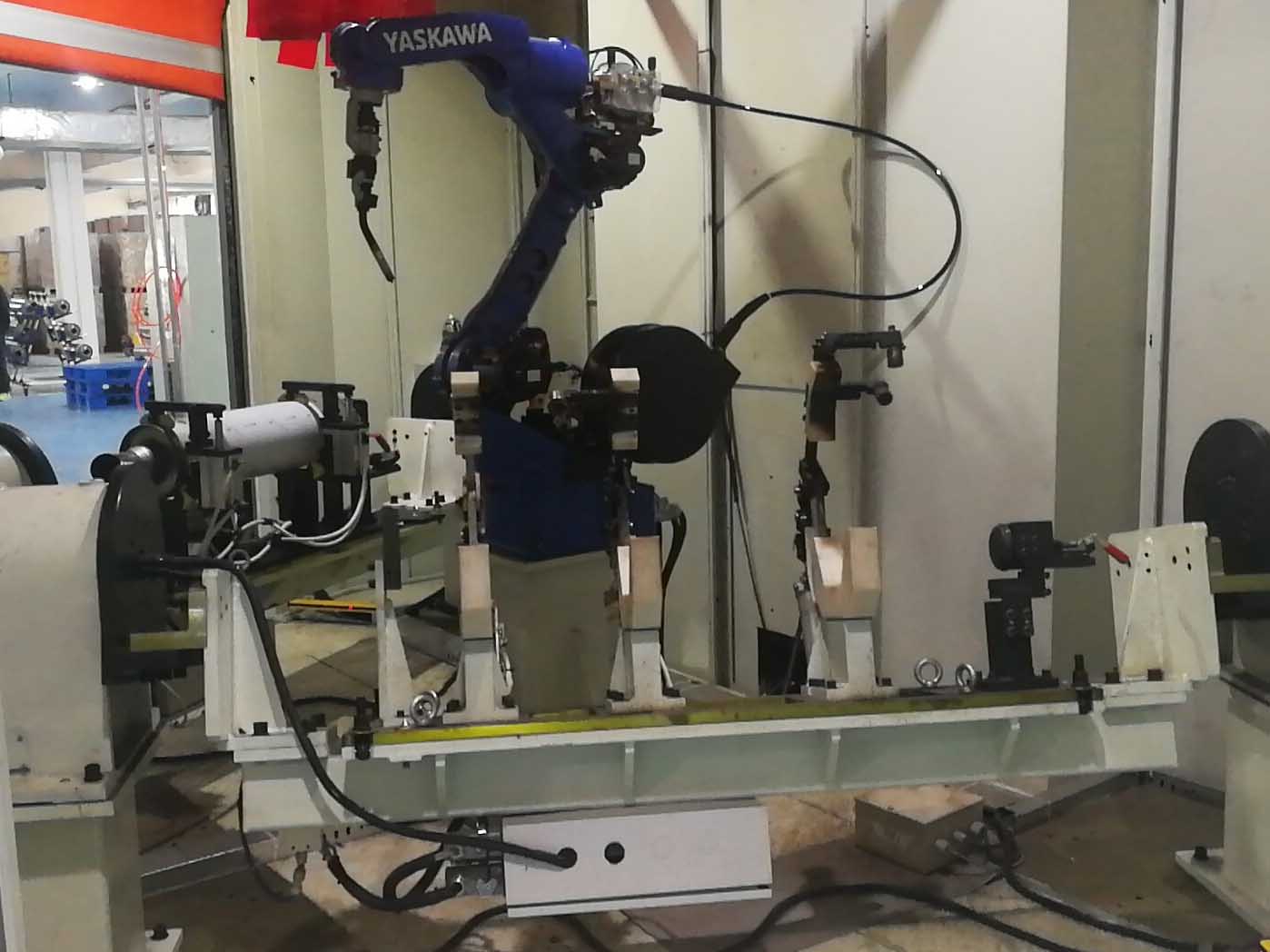
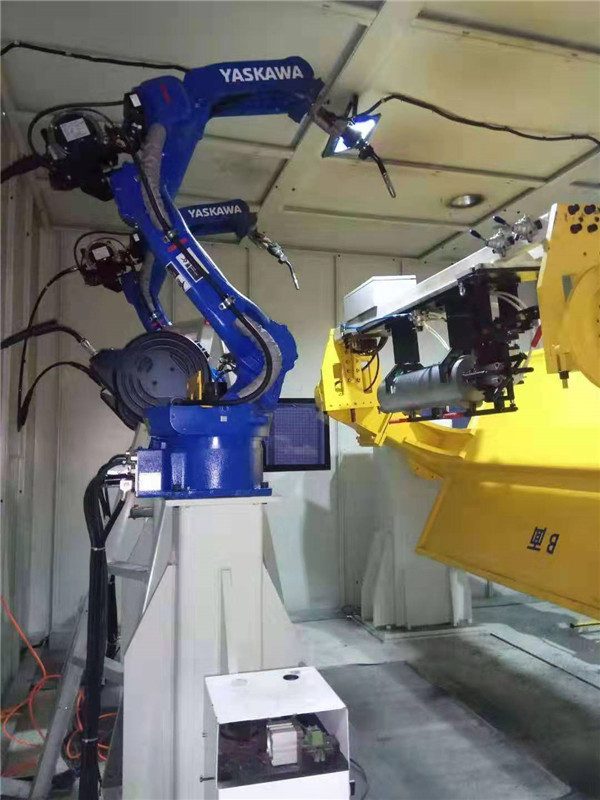
Lisaks keevitusrobotitele,keevitusroboti töötsükkelSamuti on neil maandusrööpad, positsioneerid, pöördlauad, keevitusjälgimissüsteemid, ohutuspiirded, püstolipuhastid, ohutussüsteemid ja keevitusrobotitega töötavad välisseadmed.
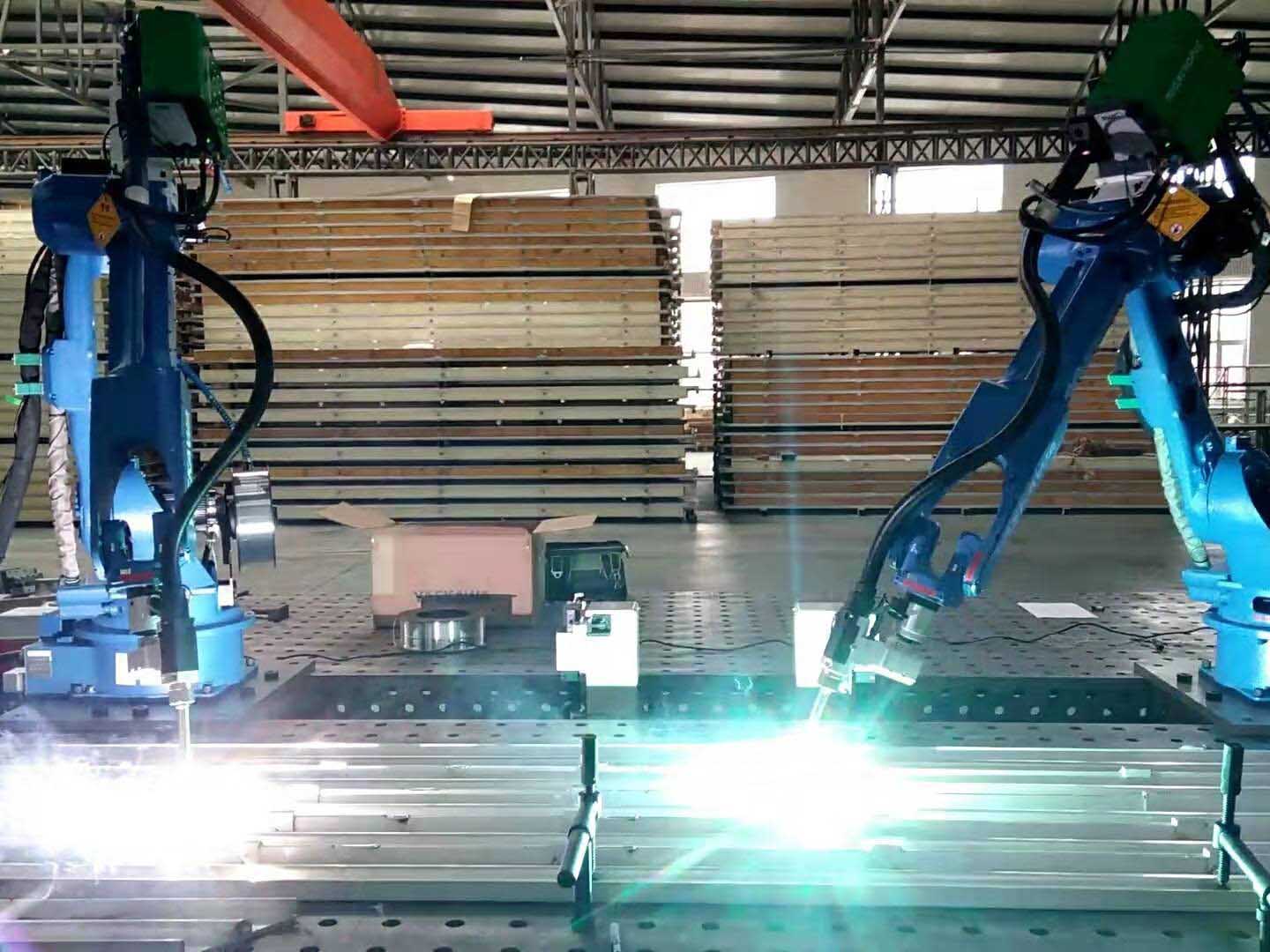
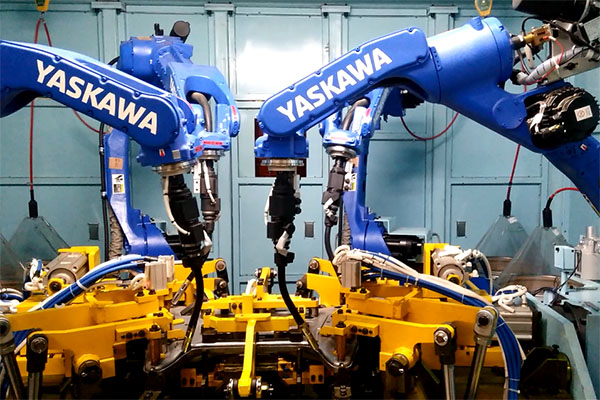
Kuikeevitusroboti tööjaamTöötamise ajal võtab roboti juhtkapp vastu väliseid signaale, näiteks keevitussignaale, õppepuldi signaale, välise juhtkapi signaale jne, ning edastab andmed robotile, et keevitaja saaks jõuda keevitusasendisse ja keevitusülesande lõpule viia. Keevituspüstol kasutab keevitusmasina suurt voolutugevust ja kõrgepinge tekitatud soojus koondatakse keevituspüstoli klemmile, et sulatada keevitustraat ja lasta sellel tungida keevitatavatesse detailidesse. Pärast jahtumist ühendatakse keevitatud objektid kindlalt üheks kehaks. Traadi etteandeseade saab pidevalt ja stabiilselt keevitustraati välja saata vastavalt seatud parameetritele, nii et keevitust saab pidevalt teha ja keevituse efektiivsus paraneb. See on ühendatud püstoli puhastusjaamaga keevitusräbu puhastamiseks, pritsimisvastase vedeliku pihustamiseks ja keevitustraadi lõikamiseks, et tagada kvaliteetne keevitustulemus.
Keevitusroboti väline juhtkapp juhib positsioneeri ning edastab mootori parameetreid ja andmeid juhtkappi. Mootor peatab keevisdetaili pöörlemise, et see saavutaks õige keevitusasendi ja aitaks keevitust lõpetada.