-

Keevitusroboti tööjaama keevitusmasina valimisel peaksite arvestama järgmiste teguritega: keevitusrakendus: määrake, millist tüüpi keevitust kavatsete teha, näiteks gaasiga varjestatud keevitamine, kaarkeevitus, laserkeevitus jne. See aitab määrata vajaliku keevitusmahu...Loe edasi»
-

Pihustusrobotite kaitseriietuse valimisel arvestage järgmiste teguritega: Kaitsetõhusus: Veenduge, et kaitseriietus pakub vajalikku kaitset värvipritsmete, kemikaalipritsmete ja osakeste eest. Materjali valik: Eelistage materjale, mis on...Loe edasi»
-

Rakendusnõuded: Määrake kindlaks konkreetsed ülesanded ja rakendused, milleks robotit kasutatakse, näiteks keevitamine, montaaž või materjalikäitlus. Erinevad rakendused nõuavad erinevat tüüpi roboteid. Töövõime: Määrake kindlaks maksimaalne kasulik koormus ja tööulatus, mida robot peab käsitsema...Loe edasi»
-
Tööstusrobotid muudavad põhjalikult meie tootmismeetodeid. Neist on saanud töötleva tööstuse nurgakivi, mis toob kaasa olulisi muutusi erinevates sektorites. Siin on mõned olulised üksikasjad selle kohta, kuidas tööstusrobotid meie tootmist ümber kujundavad: Suurem tootlikkus...Loe edasi»
-

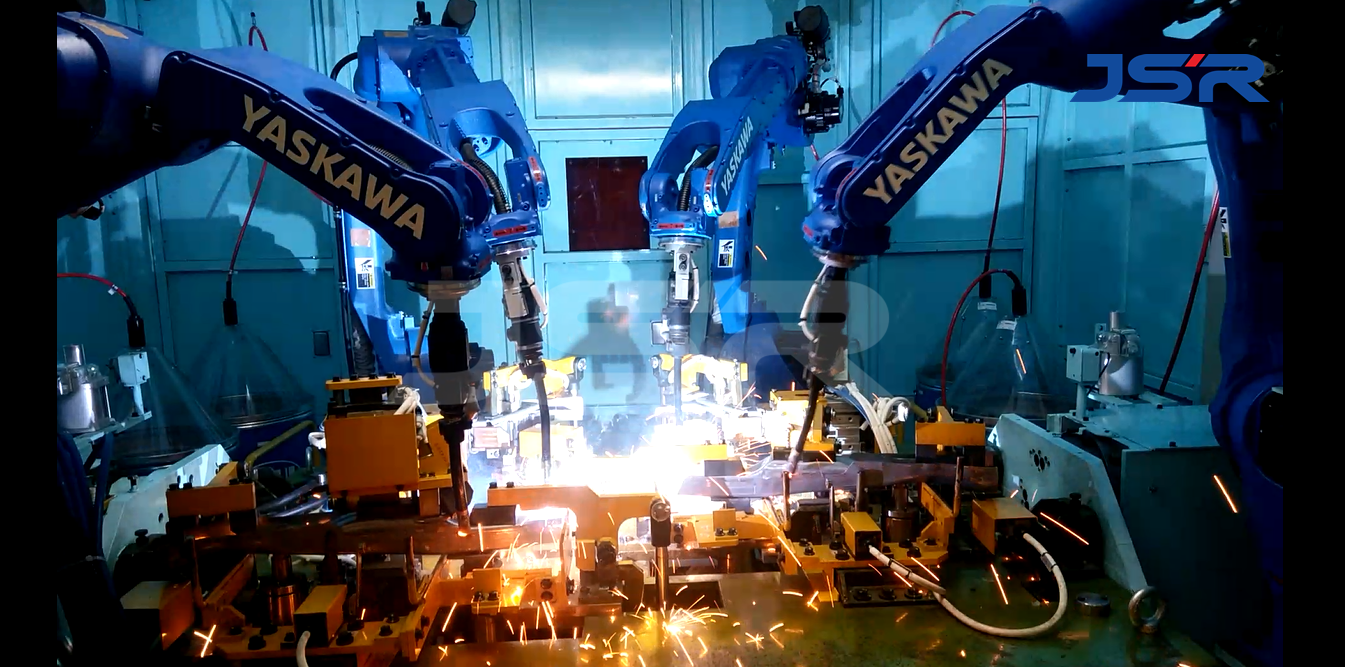
Robotid kui tööstusautomaatika integratsiooni keskmes on laialdaselt kasutusel erinevates tööstusharudes, pakkudes ettevõtetele tõhusaid, täpseid ja usaldusväärseid tootmisprotsesse. Keevitusvaldkonnas saavutavad Yaskawa robotid koos keevitusmasinate ja positsioneeridega kõrge...Loe edasi»
-

Õmbluste leidmine ja õmbluste jälgimine on kaks erinevat funktsiooni, mida kasutatakse keevitusautomaatikas. Mõlemad funktsioonid on olulised keevitusprotsessi efektiivsuse ja kvaliteedi optimeerimiseks, kuid need teevad erinevaid asju ja tuginevad erinevatele tehnoloogiatele. Õmbluste leidmise täisnimi...Loe edasi»
-

Tootmises on keevitustöökodadest saanud oluline osa täpsete ja tõhusate keevisõmbluste tegemiseks mitmesugustes rakendustes. Need töökodad on varustatud keevitusrobotitega, mis suudavad korduvalt täita ülitäpseid keevitustöid. Nende mitmekülgsus ja tõhusus aitavad vähendada tootmist...Loe edasi»
-
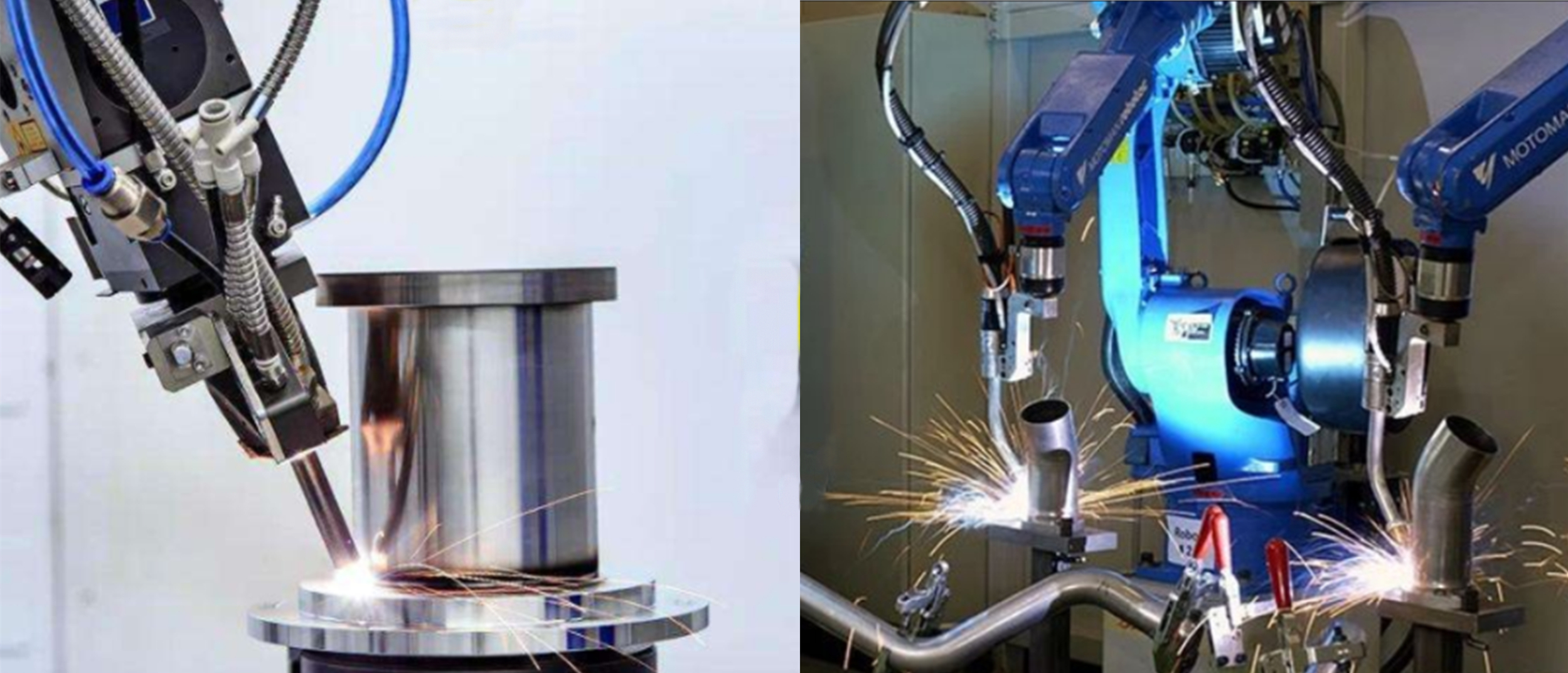
Robotlaser-keevitussüsteem koosneb keevitusrobotist, traadi etteandemasinast, traadi etteandemasina juhtpaneelist, veepaagist, laserkiirgusest, laserpeast, millel on väga suur paindlikkus, mis suudab keeruka tooriku töötlemise lõpule viia ja kohaneda tooriku muutuva olukorraga. Laser...Loe edasi»
-

Tööstusrobotite kasutamise üha ulatuslikumaks muutudes ei ole üks robot alati võimeline ülesannet hästi ja kiiresti täitma. Paljudel juhtudel on vaja ühte või mitut välist telge. Lisaks praegu turul olevatele suurtele palletiseerimisrobotitele on enamik neist nagu keevitus-, lõike- või...Loe edasi»
-

Nii nagu autot, tuleb hooldada iga poole aasta või 5000 kilomeetri järel, tuleb ka Yaskawa robotit hooldada, arvestades võimsust ja tööaega teatud aja jooksul. Kogu masin ja selle osad vajavad regulaarset kontrolli. Õige hooldus ei saa mitte ainult...Loe edasi»
-

2021. aasta septembri keskel sai Shanghai Jiesheng Robot kõne kliendilt Hebeist ja Yaskawa roboti juhtkapist alarmi. Jieshengi insenerid kiirustasid samal päeval kliendi asukohta, et kontrollida, kas komponendi vooluringi ja roboti vahelises pistikühenduses pole mingeid kõrvalekaldeid...Loe edasi»
-

1. Definitsioon: Häireala all mõeldakse tavaliselt roboti TCP (tööriista keskpunkti) sisenemist konfigureeritavasse alasse. Välisseadmete või välipersonali teavitamiseks sellest olekust – sundväljundsignaali väljastamine (välisseadmete teavitamiseks); häire peatamine (sündmuskoha personali teavitamiseks)....Loe edasi»

www.sh-jsr.com
Kuumad tooted - Saidi kaartPalleteerimisrobot, Yaskawa punktkeevitusrobot, Keevitusrobot, Yaskawa maalimisrobot, Automaatne värvimisrobot, Robotpalletiseerija,
Hankige andmeleht või tasuta hinnapakkumine
Kirjuta oma sõnum siia ja saada see meile